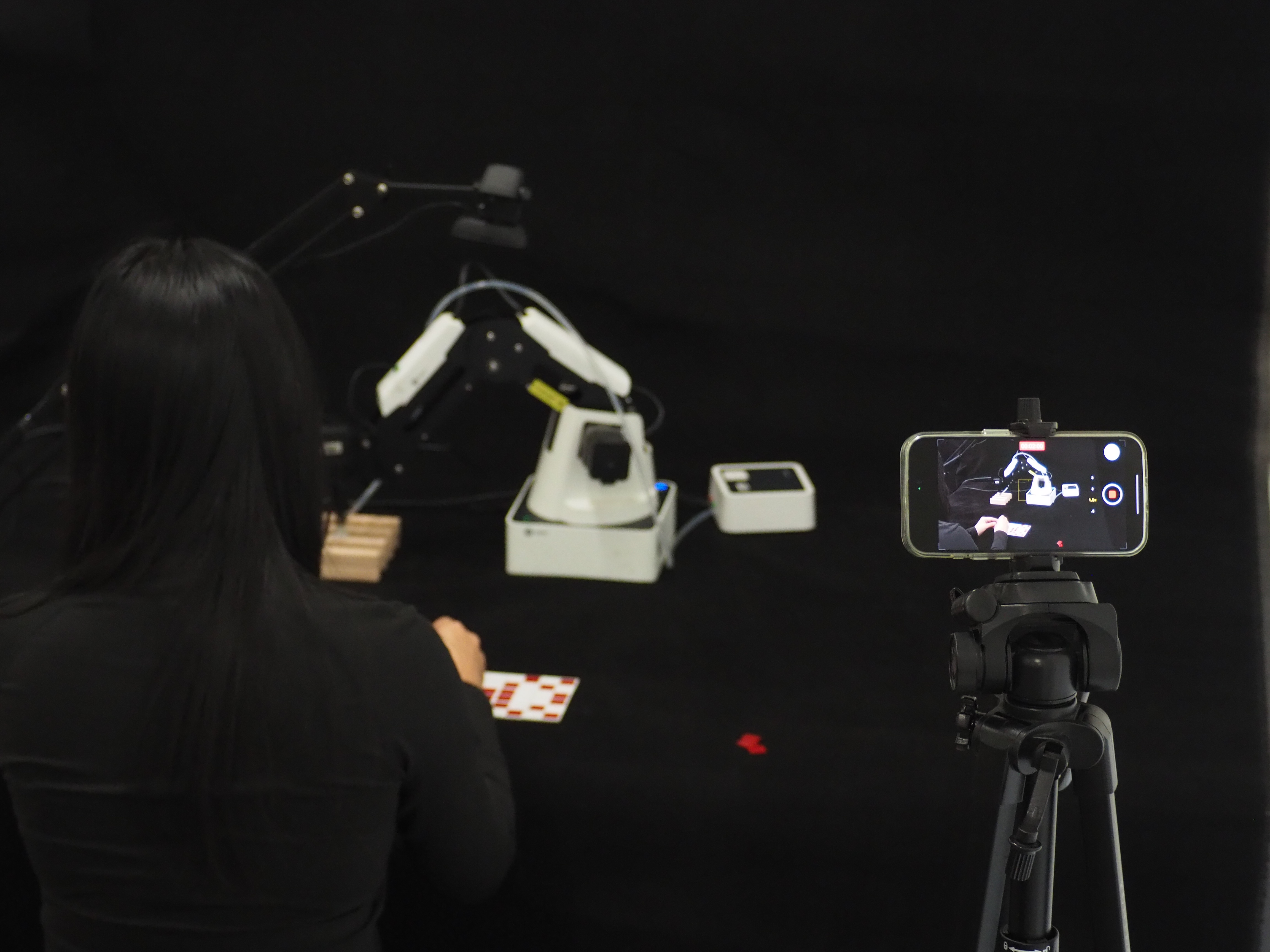
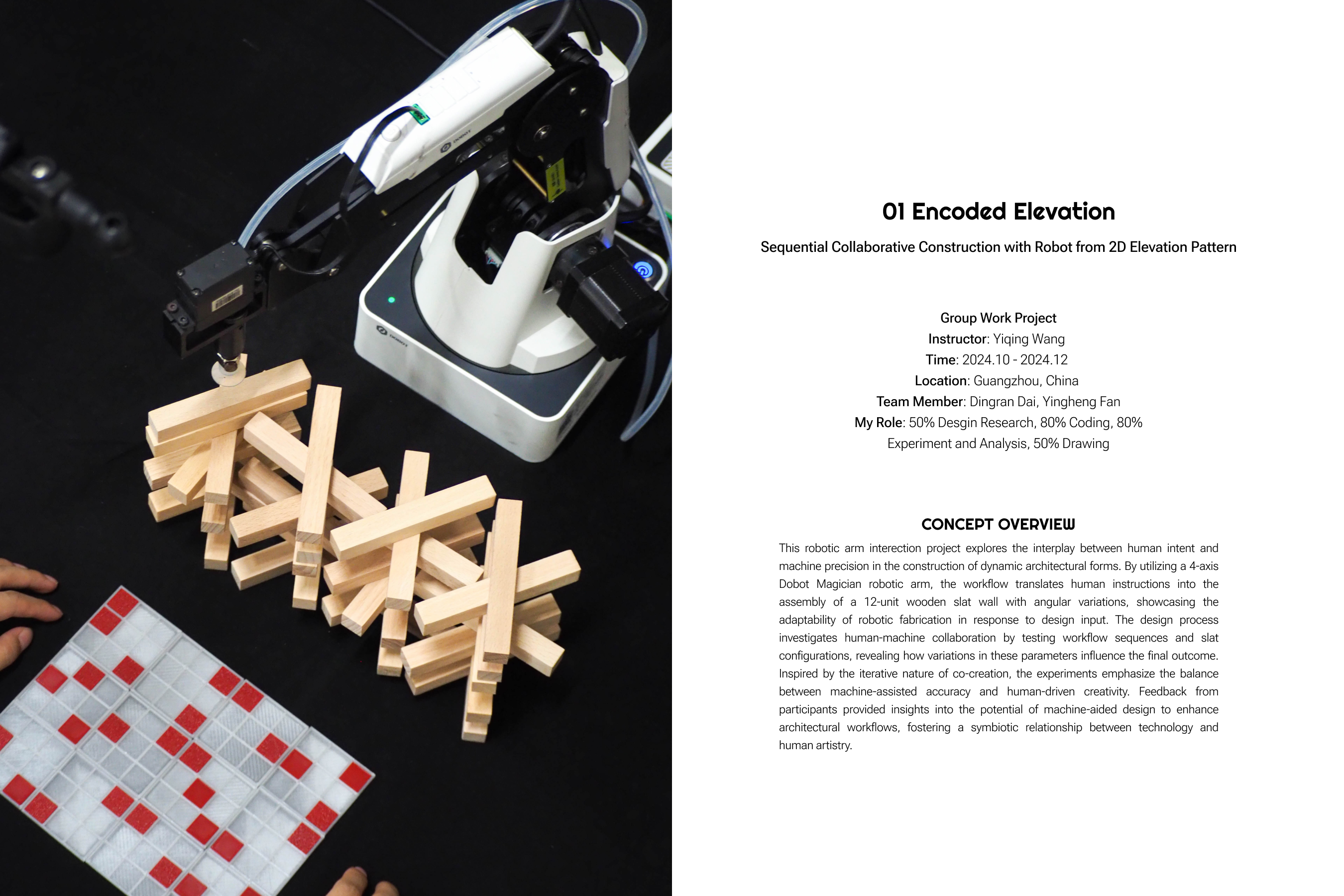
Encoded Elevation is a human–machine interaction experiment that explores how design intent can be translated into robotic construction through collaborative workflows.
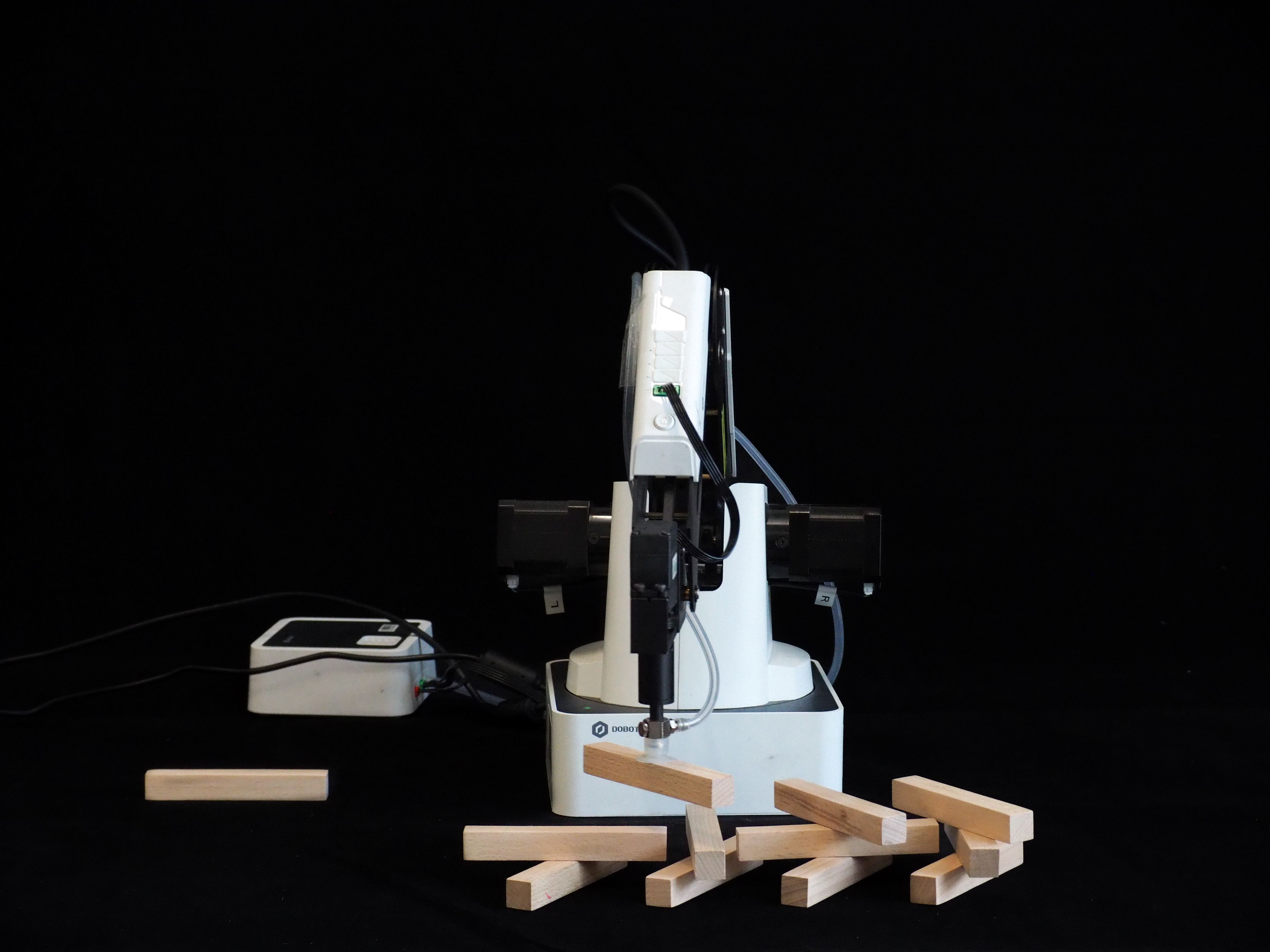
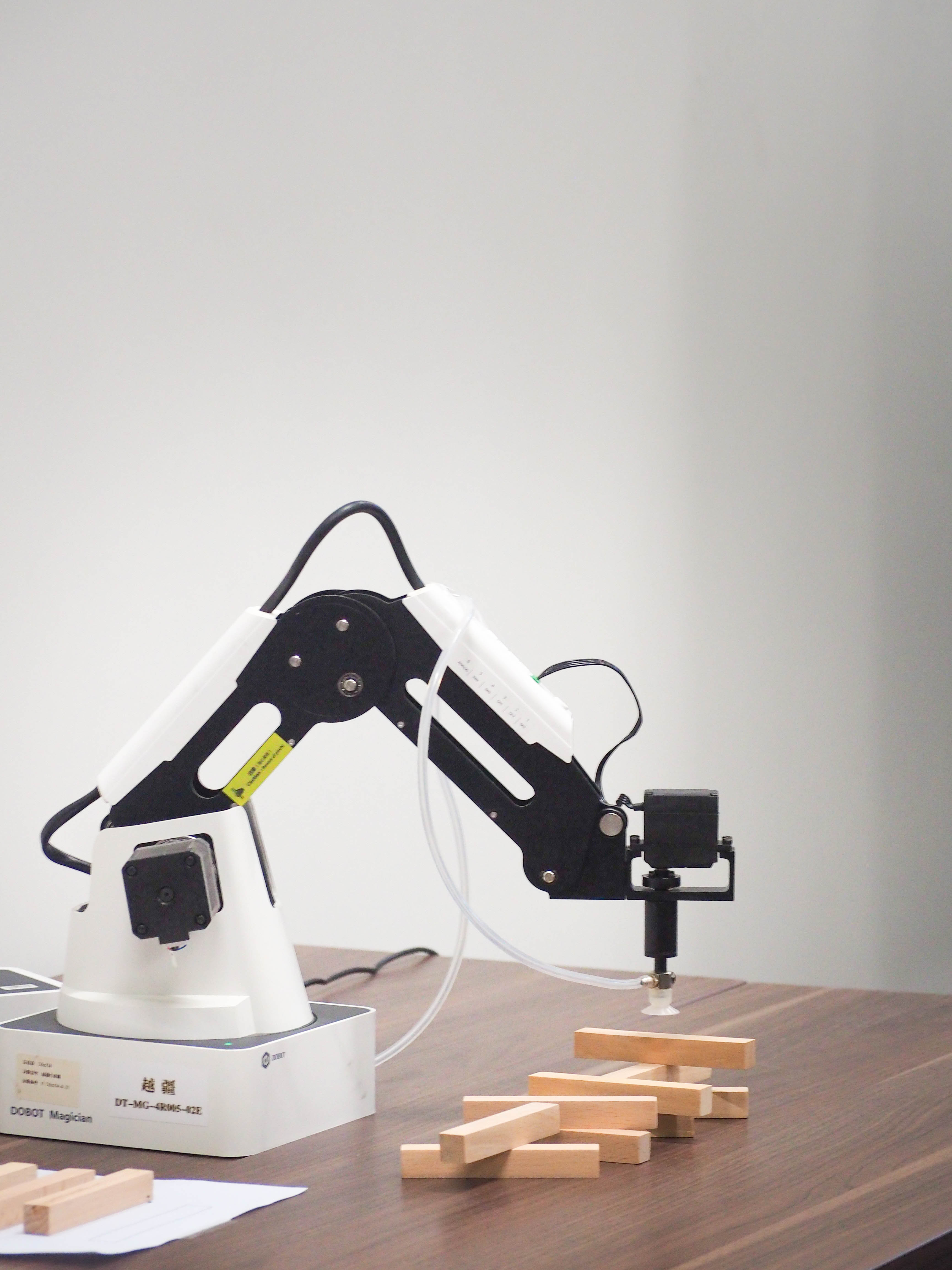
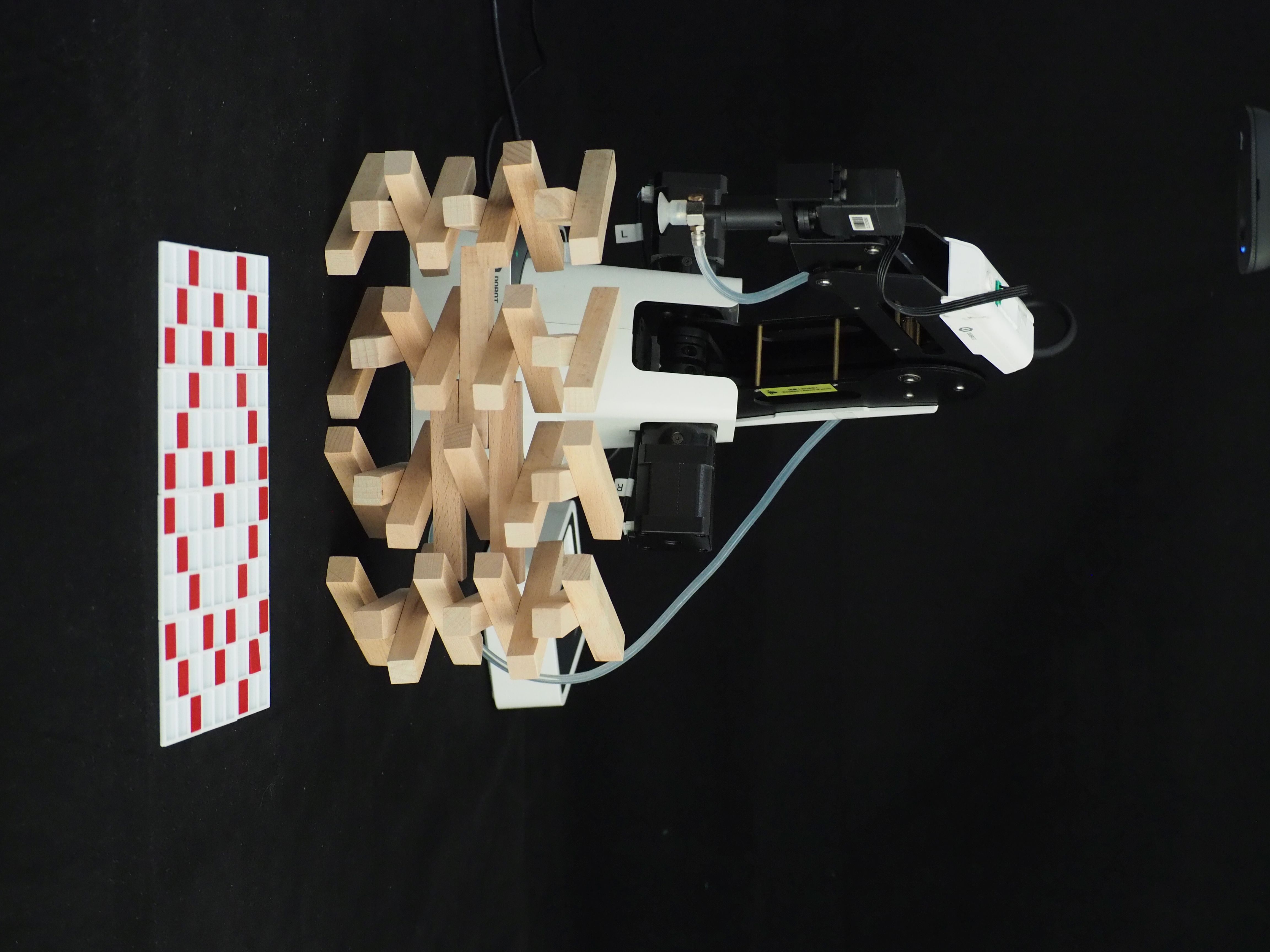
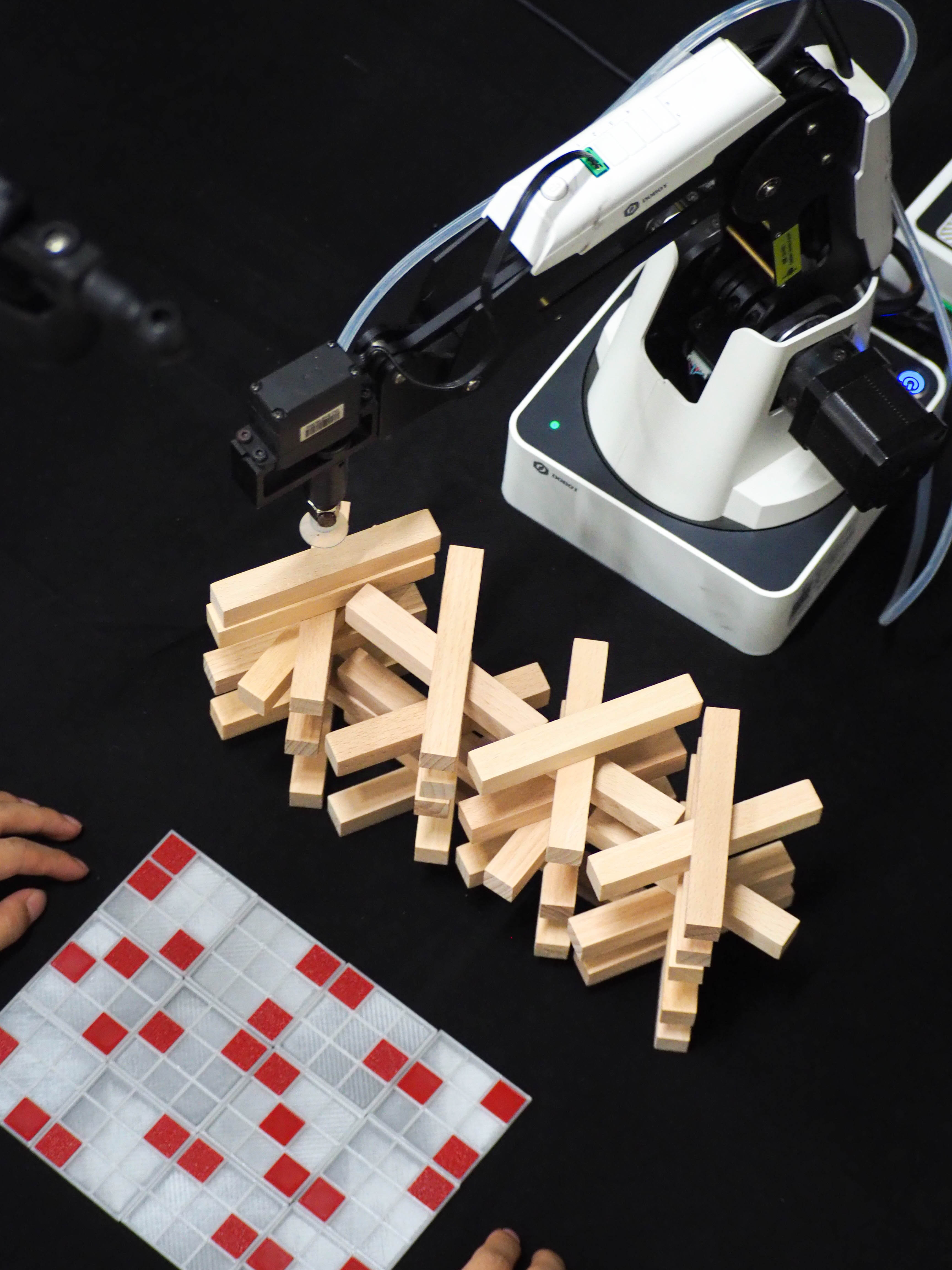
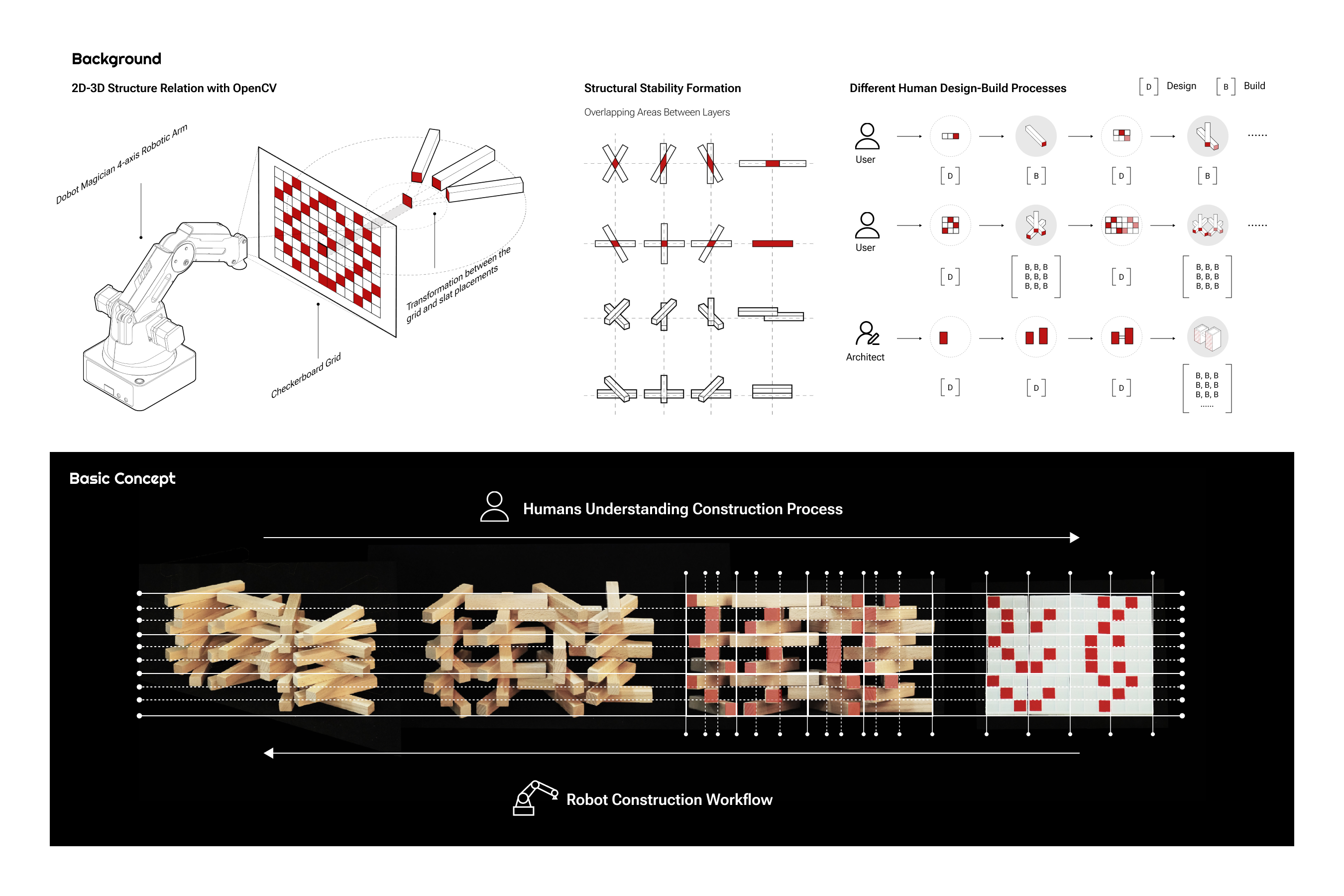
Using a 4-axis Dobot Magician robotic arm, the project transforms a 2D elevation pattern into a sequential construction process, assembling a 12-unit wooden slat wall with angular variations. By comparing different design–build workflows, the project investigates how human input, machine execution, and process sequencing influence construction outcomes.
Architectural construction is often perceived as a linear translation from design to execution. However, when humans and machines collaborate, this process becomes dynamic and negotiable.
This project builds upon:
- The relationship between 2D representations and 3D structural outcomes
- The role of machines as active collaborators rather than passive executors
- How workflow design affects human understanding of construction logic
The experiment reframes construction as a shared cognitive process between humans and robotic systems.
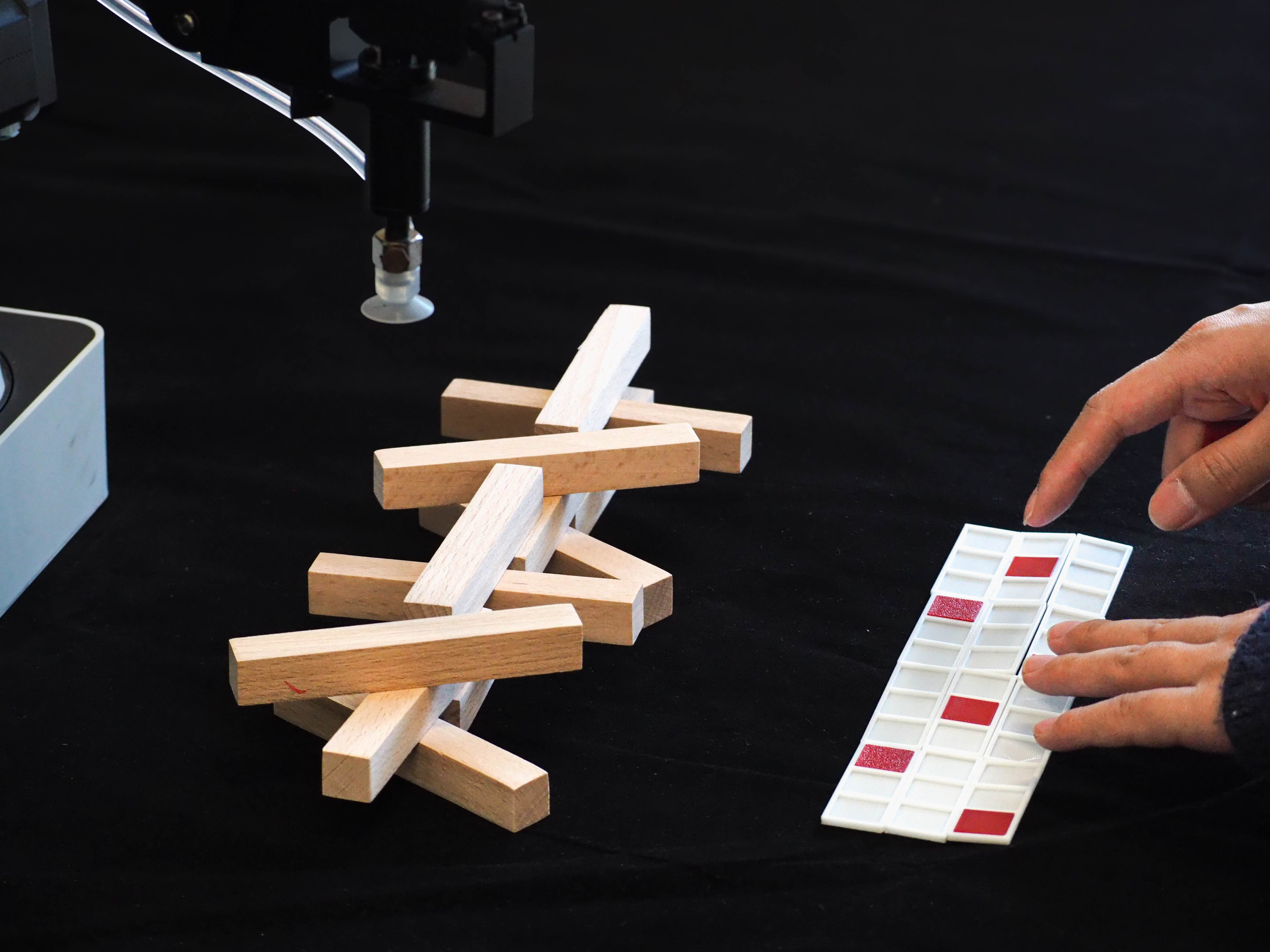
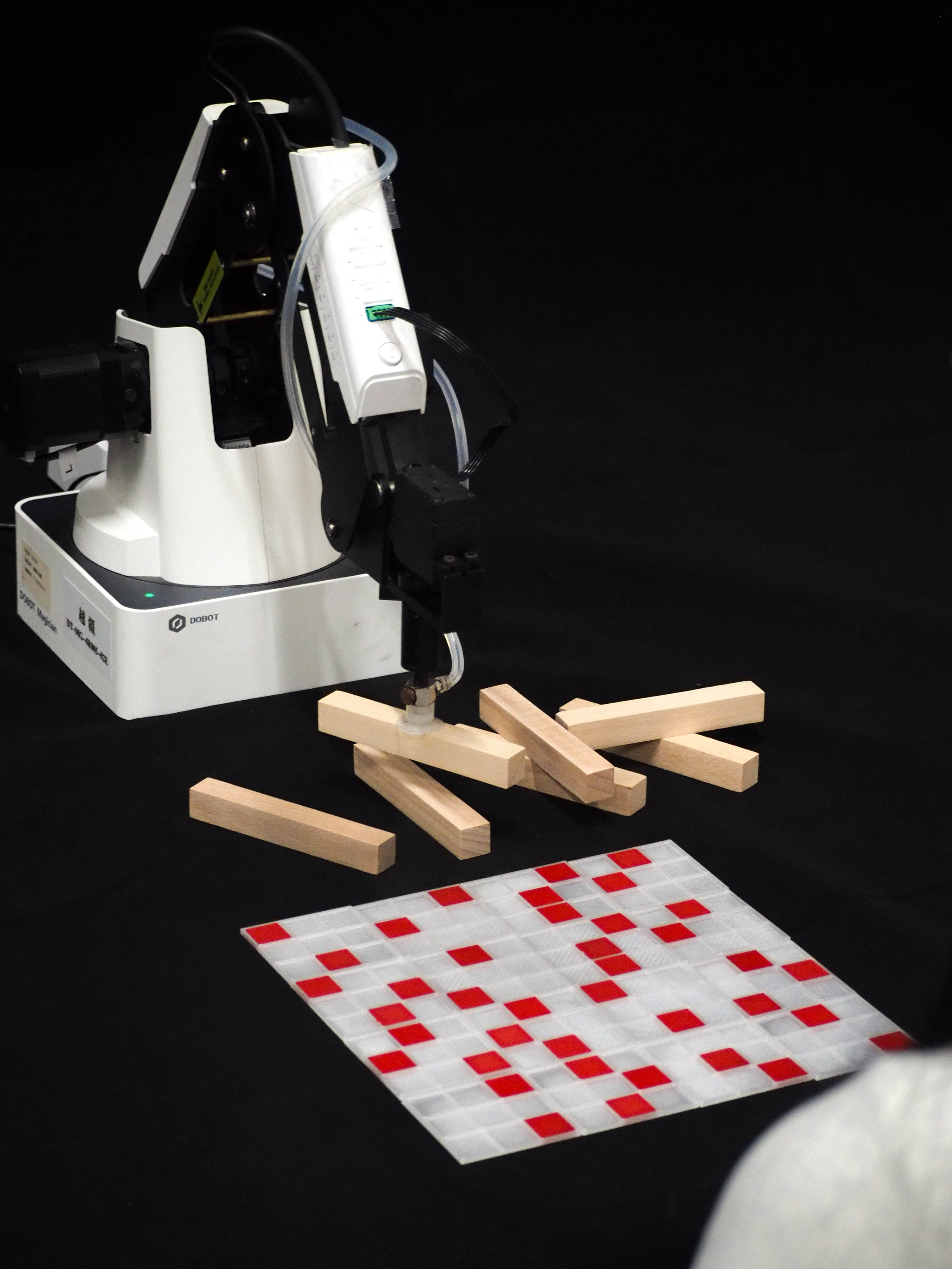
The system encodes design intent through a grid-based elevation pattern. Each grid cell represents a placement decision that is interpreted and executed by the robotic arm.
Two core concepts drive the system:
- Sequential translation: 2D input is transformed step-by-step into physical assembly
- Feedback awareness: Participants observe and adjust their design decisions based on robotic behavior
This approach emphasizes construction as a readable, interpretable process rather than a black-box automation.
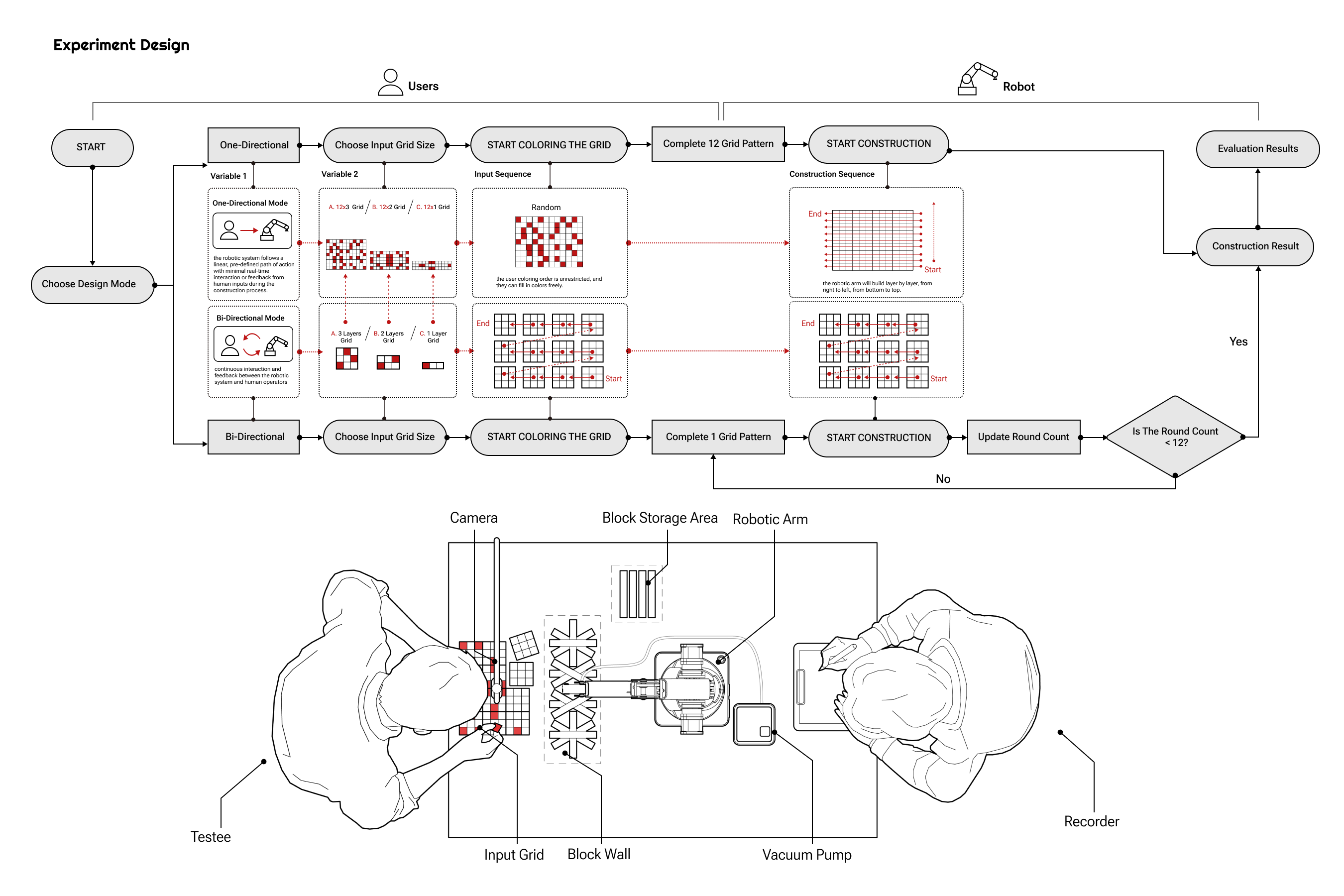
The experiment evaluates human–machine collaboration by testing two primary variables:
-
Workflow Mode
- One-directional: Human completes design before robotic construction
- Bi-directional: Continuous interaction between human input and robotic execution
-
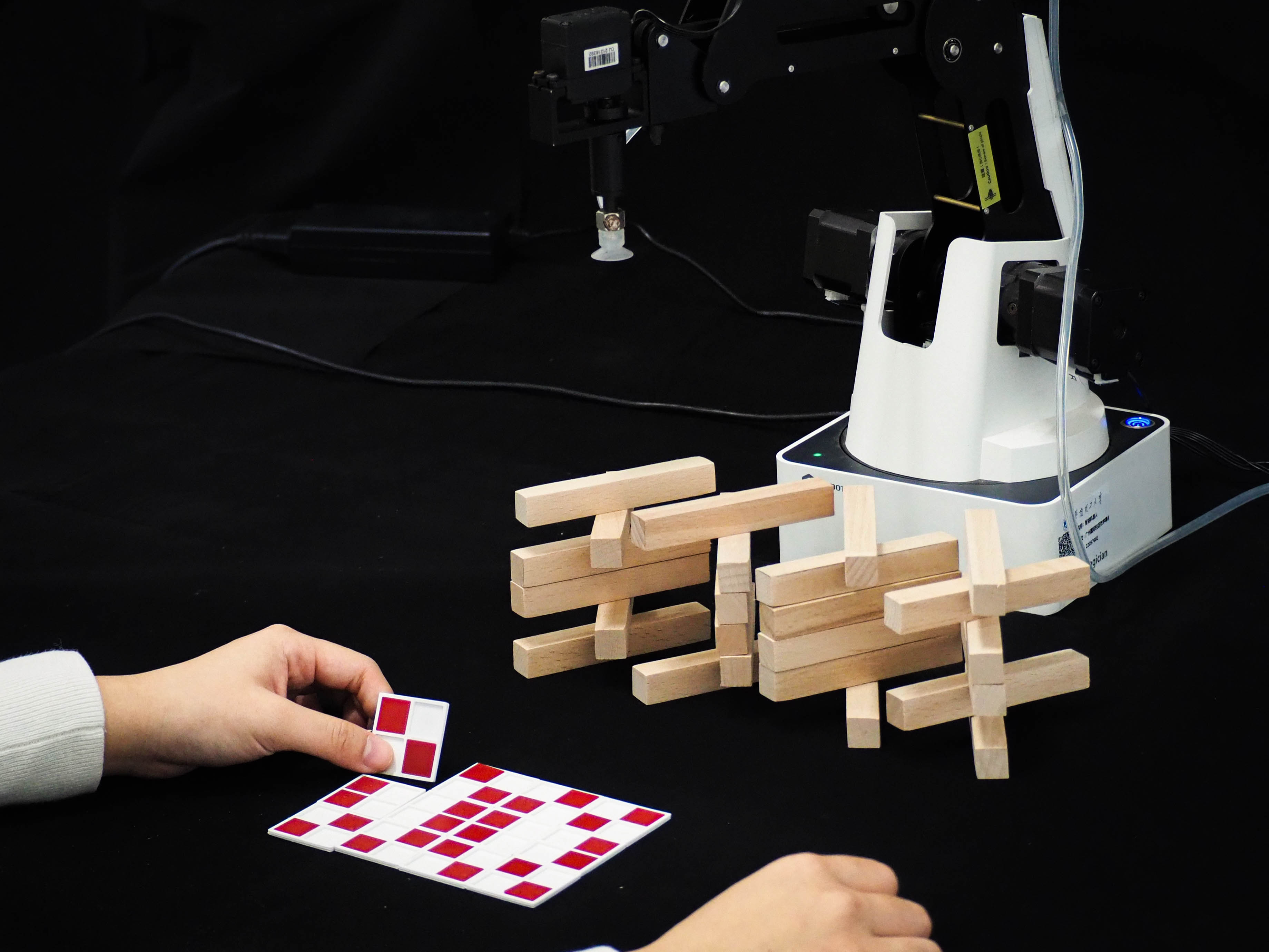
Structural Configuration
- 1-layer grid
- 2-layer grid
- 3-layer grid
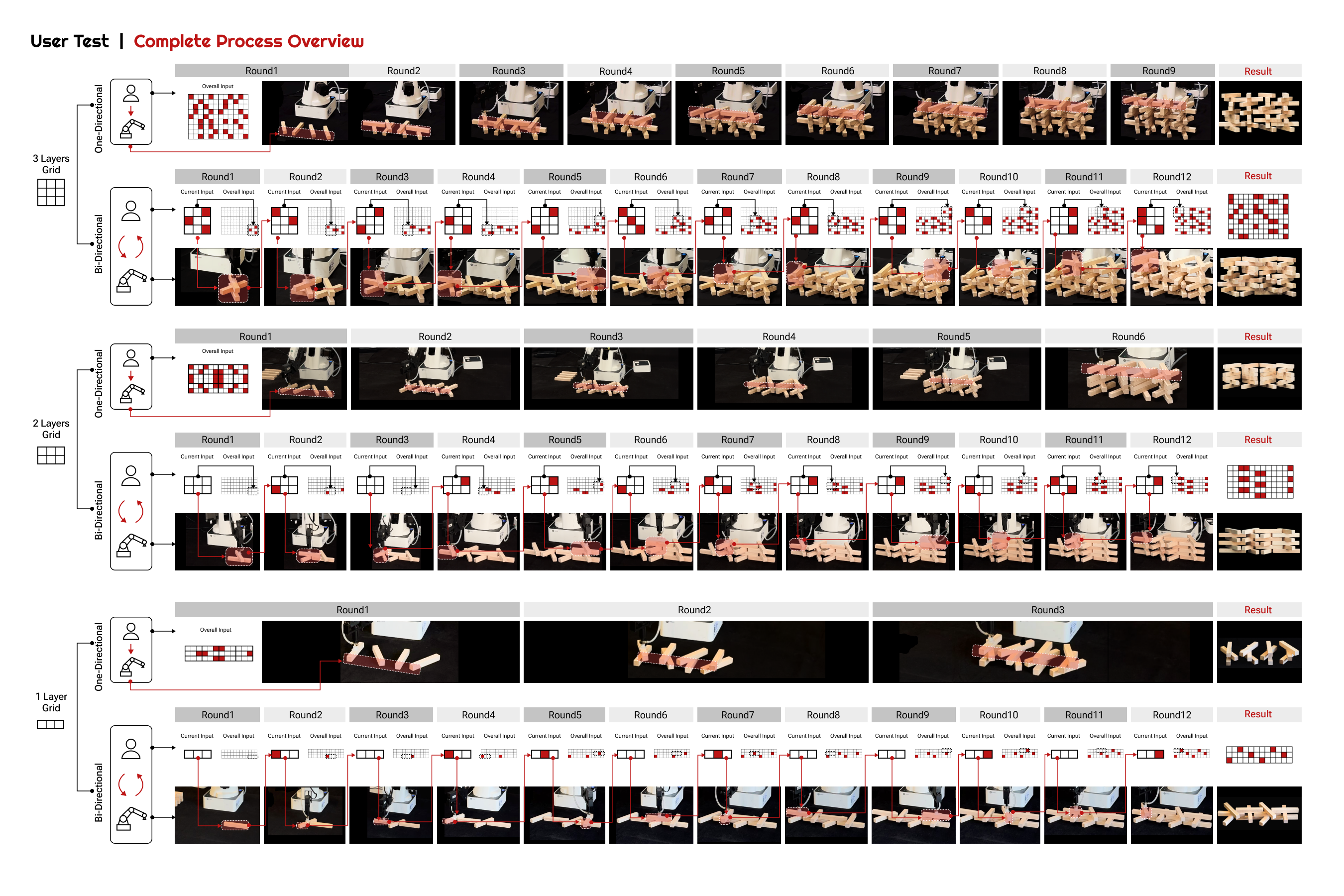
Participants colored grid patterns that served as construction instructions. The robotic arm then assembled the structure layer by layer, following predefined construction sequences.
The robotic workflow translates each grid cell into a specific placement action:
- Block pickup from storage
- Angular orientation adjustment
- Precise placement based on grid encoding
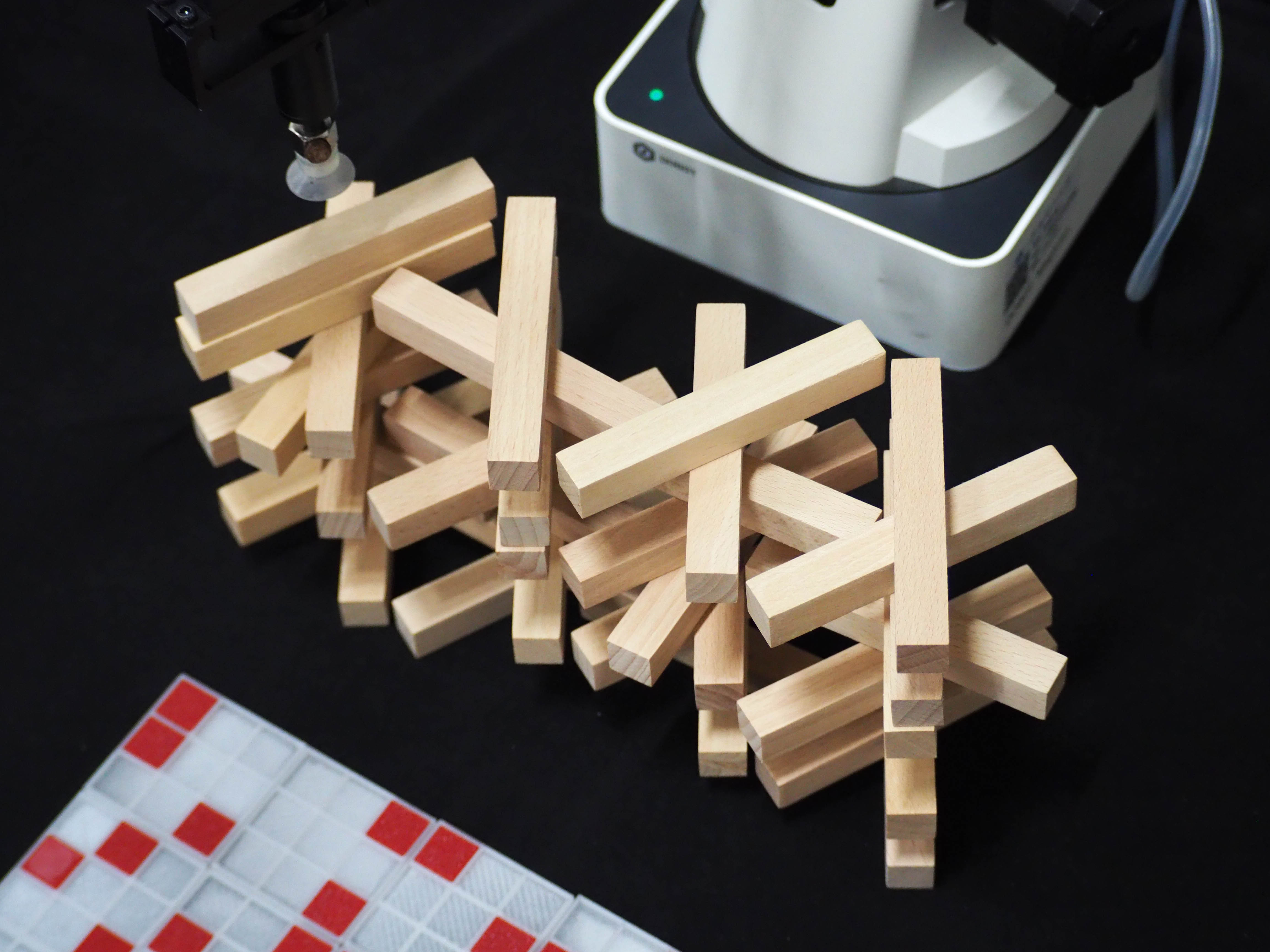
Construction proceeds from bottom to top, allowing participants to visually track how early design decisions influence later structural stability and complexity.
The contrast between human intuition and machine precision becomes visible throughout the process.
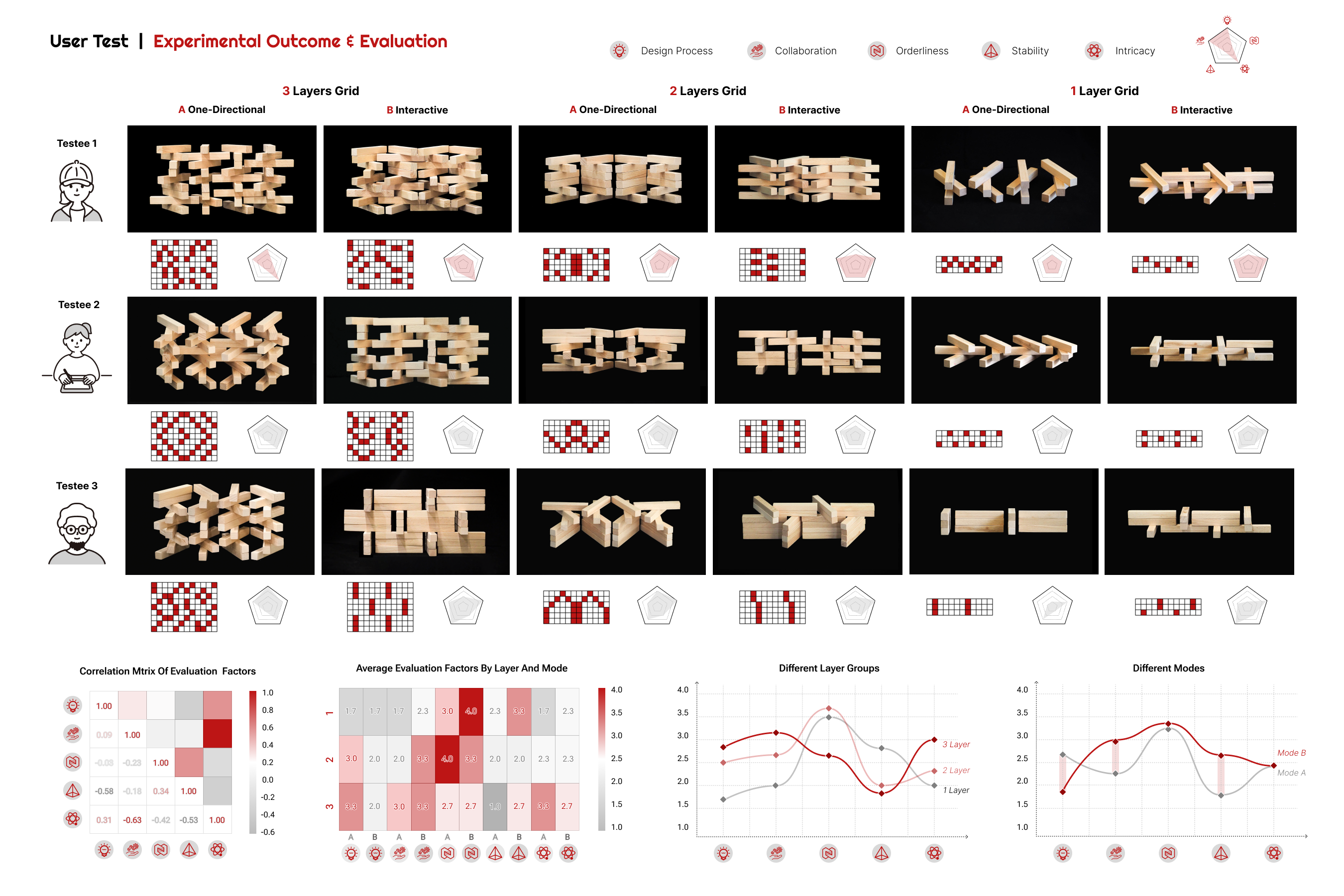
Eight participants took part in the experiment. Their interactions were documented through:
- Construction outcomes
- Iterative grid patterns
- Observational feedback
Evaluation criteria included:
- Design clarity
- Collaboration fluency
- Structural stability
- Formal intricacy
Results show that bi-directional workflows consistently produced more balanced outcomes, combining machine accuracy with human-driven variation.
The project resulted in:
- A robotic-assisted construction system
- Multiple physical wall configurations
- A comparative analysis of collaborative workflows
Encoded Elevation demonstrates how human–machine collaboration can expand creative agency rather than constrain it.
This project deepened my understanding of how interaction design extends beyond screens into physical construction systems.
Key insights include:
- Workflow design is as critical as form generation
- Machines can support creativity when their logic is legible to humans
- Iterative feedback fosters shared authorship between human and machine
Future iterations could explore adaptive feedback loops, where robotic behavior dynamically responds to real-time human adjustments.